Tutorial of OpenCV programming. Windows Visual Studio Code Python programming. Quick learning of basic knowledge of OpenCV programming.
Run following commands at terminal.
pip install --user --upgrade pip
pip install numpy
pip install opencv-python
Write python at search area of extension. Install Python(Microsoft).
Select explorer from left icon, and open folder.
Right click explorer and clicke [new file]. Write file name.
Click blue status bar at left bottom. If [Select the workspace to set the interpreter] appear, select working directory you made just now. Choose the environment you made just now at Anaconda when [select interpreter] appeared.
Write as follows at source code edit area.
import numpy
import cv2
print(numpy.__version__)
print(cv2.__version__)
import numpy as np
def main():
mata=np.zeros((2,2),dtype=np.float64)
vecx=np.zeros((2,1),dtype=np.float64)
mata[0,0]=1
mata[0,1]=2
mata[1,0]=3
mata[1,1]=4
vecx[0,0]=2
vecx[1,0]=1
vecb=mata@vecx
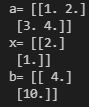
print('a=',mata)
print('x=',vecx)
print('b=',vecb)
if __name__=='__main__':
main()
import numpy as np
import cv2
def main():
img=np.zeros((480,640,3),dtype=np.uint8)
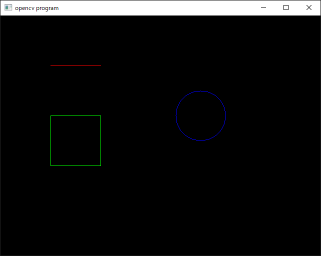
cv2.line(img,(100,100),(200,100),(0,0,255))
cv2.rectangle(img,(100,200),(200,300),(0,255,0))
cv2.circle(img,(400,200),50,(255,0,0))
cv2.imshow('opencv program',img)
cv2.waitKey()
cv2.destroyAllWindows()
if __name__=='__main__':
main()
import numpy as np
import cv2
def main():
input=cv2.imread('meal41.jpg',cv2.IMREAD_COLOR)
if input is None:
print('Cannot open file')
return
rows,cols,_=input.shape
output=input.copy()
for y in range(0,rows):
for x in range(0,cols):
r=input[y,x,2]
g=input[y,x,1]
b=input[y,x,0]
output[y,x,2]=0.9*r
output[y,x,1]=0.7*g
output[y,x,0]=0.4*b
cv2.imwrite('output.bmp',output)
if __name__=='__main__':
main()


import numpy as np
import cv2
def main():
input=cv2.imread('grayscale.jpg',cv2.IMREAD_GRAYSCALE)
if input is None:
print('Cannot open file')
return
rows,cols=input.shape
output=input.copy()
for y in range(0,rows):
for x in range(0,cols):
num=0
val=0
for
yy in [y-1,y,y+1]:
for
xx in [x-1,x,x+1]:
if
0<=xx<cols and 0<=yy<rows:
val+=input[yy,xx]
num+=1
output[y,x]=val/num
cv2.imwrite('output.bmp',output)
if __name__=='__main__':
main()


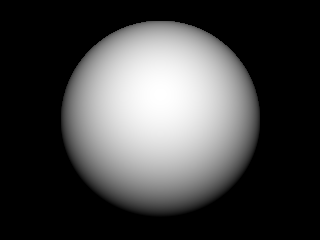
input0.bmp
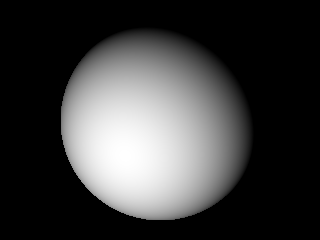
input1.bmp
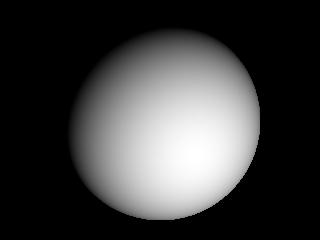
input2.bmp
import numpy as np
import cv2
def main():
input=[]
input.append(cv2.imread('input0.bmp',cv2.IMREAD_GRAYSCALE))
input.append(cv2.imread('input1.bmp',cv2.IMREAD_GRAYSCALE))
input.append(cv2.imread('input2.bmp',cv2.IMREAD_GRAYSCALE))
if input[0] is None or input[1] is None or input[2]
is None:
print('Cannot open file')
return
rows,cols=input[0].shape
matl=np.zeros((3,3),dtype=np.float64)
matl[0,0]=1.58546E-17
matl[0,1]=0.258819045
matl[0,2]=0.965925826
matl[1,0]=-0.353553391
matl[1,1]=-0.353553391
matl[1,2]=0.866025404
matl[2,0]=0.353553391
matl[2,1]=-0.353553391
matl[2,2]=0.866025404
invl=np.linalg.inv(matl)
output=np.zeros((rows,cols,3),dtype=np.float32)
for y in range(0,rows):
for x in range(0,cols):
veci=np.zeros((3,1),dtype=np.float64)
veci[0,0]=input[0][y,x]
veci[1,0]=input[1][y,x]
veci[2,0]=input[2][y,x]
vecn=invl@veci
r=np.linalg.norm(vecn)
if
r>1e-15:
vecn/=r
output[y,x,0]=vecn[0,0]
output[y,x,1]=vecn[1,0]
output[y,x,2]=vecn[2,0]
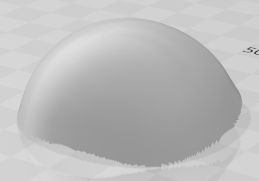
with open('normal.float',mode='wb') as f:
output.astype(np.float32).tofile(f)
if __name__=='__main__':
main()
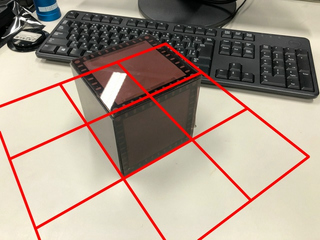
import numpy as np
import cv2
def main():
input=[]
input.append(cv2.imread('image1.jpg',cv2.IMREAD_COLOR))
input.append(cv2.imread('image2.jpg',cv2.IMREAD_COLOR))
if input[0] is None or input[1] is None:
print('Cannot open file')
return
output=[input[0].copy(),input[1].copy()]
rows,cols,_=input[0].shape
list3d=[]
list2d=[]
item3d=[]
item2d=[]
item3d.append([1,0,0])
item2d.append([234,306])
item3d.append([0,1,0])
item2d.append([448,265])
item3d.append([0,0,1])
item2d.append([320,90])
item3d.append([1,1,0])
item2d.append([391,370])
item3d.append([0,1,1])
item2d.append([475,121])
item3d.append([1,0,1])
item2d.append([225,147])
item3d.append([1,1,1])
item2d.append([413,196])
list3d.append(item3d)
list2d.append(item2d)
item3d=[]
item2d=[]
item3d.append([1,0,0])
item2d.append([174,249])
item3d.append([0,1,0])
item2d.append([384,276])
item3d.append([0,0,1])
item2d.append([298,69])
item3d.append([1,1,0])
item2d.append([244,359])
item3d.append([0,1,1])
item2d.append([404,154])
item3d.append([1,0,1])
item2d.append([138,125])
item3d.append([1,1,1])
item2d.append([226,239])
list3d.append(item3d)
list2d.append(item2d)
list3d=np.array(list3d,dtype=np.float32)
list2d=np.array(list2d,dtype=np.float32)
intrinsic=np.array([
[1000,0,cols/2],
[0,1000,rows/2],
[0,0,1]
],dtype=np.float64)
dist=np.zeros((1,4),dtype=np.float64)
_,intrinsic,dist,vecr,vect=cv2.calibrateCamera(
list3d,list2d,(cols,rows),intrinsic,dist,
flags=
cv2.CALIB_USE_INTRINSIC_GUESS|
cv2.CALIB_FIX_PRINCIPAL_POINT|
cv2.CALIB_FIX_ASPECT_RATIO|
cv2.CALIB_ZERO_TANGENT_DIST|
cv2.CALIB_FIX_K1|
cv2.CALIB_FIX_K2|
cv2.CALIB_FIX_K3|
cv2.CALIB_FIX_K4|
cv2.CALIB_FIX_K5|
cv2.CALIB_FIX_K6)
print('Camera intrinsic matrix')
print(intrinsic)
print('Translation vector')
print(vect[0])
print(vect[1])
print('Rotation matrix')
matr=[cv2.Rodrigues(vecr[0])[0],cv2.Rodrigues(vecr[1])[0]]
print(matr[0])
print(matr[1])
for c in range(0,2):
for i in [-1,0,1,2]:
point=[]
point.append(np.array([[-1],[i],[0]],dtype=np.float64))
point.append(np.array([[2],[i],[0]],dtype=np.float64))
point.append(np.array([[i],[-1],[0]],dtype=np.float64))
point.append(np.array([[i],[2],[0]],dtype=np.float64))
point=[intrinsic@(matr[c]@p+vect[c])
for p in point]
point=[[int(p[0,0]/p[2,0]),int(p[1,0]/p[2,0])]
for p in point]
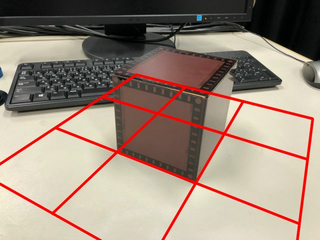
cv2.line(output[c],point[0],point[1],(0,0,255),
thickness=3,lineType=cv2.LINE_AA)
cv2.line(output[c],point[2],point[3],(0,0,255),
thickness=3,lineType=cv2.LINE_AA)
cv2.imwrite('output1.jpg',output[0])
cv2.imwrite('output2.jpg',output[1])
if __name__=='__main__':
main()
VS Code extensions for Python programming.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}